Elon Musk Pamer Mechazilla, Robot Raksasa Penangkap Roket
Senin, 10 Januari 2022 - 19:04 WIB
loading...
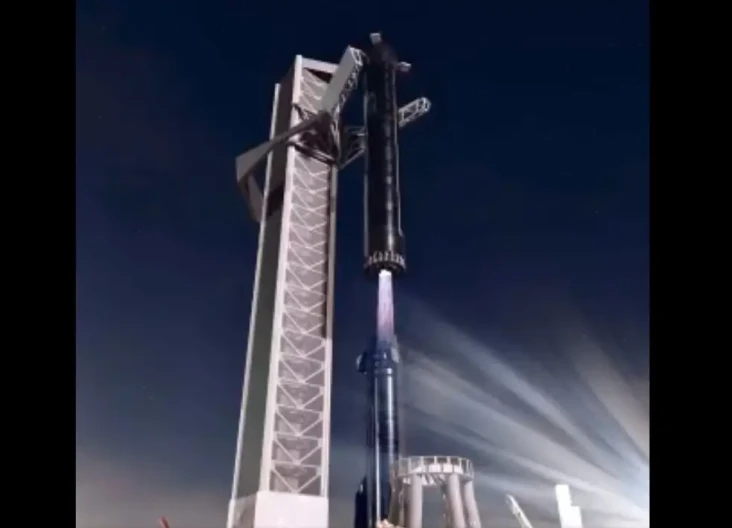
Ilustrasi saat Mechazilla menangkap roket yang mendarat. Foto/twitter
A
A
A
TEXAS - CEO SpaceX Elon Musk memuji kemajuan yang dicapai dalam pengujian mekanisme robot raksasa di landasan peluncuran SpaceX di Texas selatan, Senin (10/1/2022).
Robot raksasa itu dibangun untuk menangkap roket dan pesawat antariksa yang kembali dari luar angkasa.
Super Heavy adalah kendaraan peluncuran khusus untuk Starship, pesawat ruang angkasa SpaceX yang dirancang untuk misi Bulan dan Mars.
Baca juga: Israel Ogah Terikat Kesepakatan Nuklir Iran Apapun, Pilih Bebas Beraksi
Sistem peluncuran dimaksudkan untuk membuat pengiriman kru dan kargo besar ke luar angkasa lebih murah dari sebelumnya, karena kedua elemennya dapat digunakan lagi sepenuhnya.
Baca juga: Presiden Kazakhstan Klaim Negaranya telah Melewati Upaya Kudeta
Dalam posting Twitter pada Minggu, Musk memamerkan mekanisme robot raksasa yang diharapkan memungkinkan roket dan pesawat ruang angkasa untuk ditangkap di udara ketika mereka kembali ke pangkalan.
Baca juga: Australia Beli Senjata Baru Rp36 Triliun, Termasuk 75 Tank M1A2 Abrams
Menara peluncuran dan penangkapan kembali itu dijuluki “Mechazilla” oleh pengusaha luar angkasa itu. Saat ini robot raksasa sedang menjalani tes di fasilitas Boca Chica SpaceX di Texas.
Pada Agustus tahun lalu, Musk membalas posting Twitter tentang animasi 3D tentang bagaimana lengan “sumpit robot” setinggi 134 meter akan bekerja dengan roket Super Heavy.
Musk, mengatakan itu "cukup dekat." Para insinyur telah menguji dan mengkalibrasi aktuator hidrolik dan peralatan lainnya sejak awal Januari.
Penerbangan uji orbital pertama dari sistem peluncuran transplanet diharapkan berlangsung pada Januari atau Februari, tetapi telah ditunda hingga Maret karena evaluasi yang sedang berlangsung oleh Administrasi Penerbangan Federal AS (FAA).
Rencana penerbangan, bagaimanapun, tidak termasuk pemulihan Super Heavy B4 atau Starship S20.
Keduanya dijadwalkan melakukan splashdown di Teluk Meksiko dan Samudra Pasifik masing-masing, setelah menyelesaikan bagian misi uji mereka.
SpaceX terkenal karena memperkenalkan fitur penggunaan kembali yang hemat biaya dalam sistem peluncurannya yang kurang bertenaga, terutama secara rutin menggunakan lagi tahap pertama Falcon 9.
Namun, pendekatan yang digunakan perusahaan sekarang melibatkan pendaratan booster bekas pakai pada platform terapung robotik atau landasan pendaratan, daripada menangkap mereka dalam penerbangan dengan lengan robot.
Robot raksasa itu dibangun untuk menangkap roket dan pesawat antariksa yang kembali dari luar angkasa.
Super Heavy adalah kendaraan peluncuran khusus untuk Starship, pesawat ruang angkasa SpaceX yang dirancang untuk misi Bulan dan Mars.
Baca juga: Israel Ogah Terikat Kesepakatan Nuklir Iran Apapun, Pilih Bebas Beraksi
Sistem peluncuran dimaksudkan untuk membuat pengiriman kru dan kargo besar ke luar angkasa lebih murah dari sebelumnya, karena kedua elemennya dapat digunakan lagi sepenuhnya.
Baca juga: Presiden Kazakhstan Klaim Negaranya telah Melewati Upaya Kudeta
Dalam posting Twitter pada Minggu, Musk memamerkan mekanisme robot raksasa yang diharapkan memungkinkan roket dan pesawat ruang angkasa untuk ditangkap di udara ketika mereka kembali ke pangkalan.
Baca juga: Australia Beli Senjata Baru Rp36 Triliun, Termasuk 75 Tank M1A2 Abrams
Menara peluncuran dan penangkapan kembali itu dijuluki “Mechazilla” oleh pengusaha luar angkasa itu. Saat ini robot raksasa sedang menjalani tes di fasilitas Boca Chica SpaceX di Texas.
Pada Agustus tahun lalu, Musk membalas posting Twitter tentang animasi 3D tentang bagaimana lengan “sumpit robot” setinggi 134 meter akan bekerja dengan roket Super Heavy.
Musk, mengatakan itu "cukup dekat." Para insinyur telah menguji dan mengkalibrasi aktuator hidrolik dan peralatan lainnya sejak awal Januari.
Penerbangan uji orbital pertama dari sistem peluncuran transplanet diharapkan berlangsung pada Januari atau Februari, tetapi telah ditunda hingga Maret karena evaluasi yang sedang berlangsung oleh Administrasi Penerbangan Federal AS (FAA).
Rencana penerbangan, bagaimanapun, tidak termasuk pemulihan Super Heavy B4 atau Starship S20.
Keduanya dijadwalkan melakukan splashdown di Teluk Meksiko dan Samudra Pasifik masing-masing, setelah menyelesaikan bagian misi uji mereka.
SpaceX terkenal karena memperkenalkan fitur penggunaan kembali yang hemat biaya dalam sistem peluncurannya yang kurang bertenaga, terutama secara rutin menggunakan lagi tahap pertama Falcon 9.
Namun, pendekatan yang digunakan perusahaan sekarang melibatkan pendaratan booster bekas pakai pada platform terapung robotik atau landasan pendaratan, daripada menangkap mereka dalam penerbangan dengan lengan robot.
(sya)
Lihat Juga :